Zoek & Vind
Het juiste nieuws
Nieuwsoverzicht
- Waarom en hoe een machine koppelen aan het internet via IoT
- Nieuw partnerschap: Bansbach Easylift
- Verse Patisserie dankzij de MD800 multi-as frequentiesturing
- Oriental Motor breidt het gamma aan elektrische grijpers uit.
- Maedler: nieuwe producten en handige e-cataloog
- White paper: Motorkeuze in lineaire bewegingstoepassingen
- Oriental Motor: Nieuwe connectoren AZ-familie zorgen voor IP66 bescherming.
- Nieuw in het gamma: gasveren
- JVL: 320W geïntegreerde Borstelloze DC motor voor OEM machines MAC320-L
- Restenergie recupereren met INOVANCE frequentieregelaars en een Active Front End
- Energiebesparen met efficiënte en compacte drives van Oriental Motor
- HaydonKerk: Nieuwe lineaire slede brengt alle technologische voordelen samen in 1 product
- Doga: 2 nieuwe motoren én een nieuwe cataloog
- White paper: Stappenmotoren en het effect van acceleratie/ deceleratie
- JVL: Nieuwe generatie MAC140/MAC141 Motoren met Absolute multi-turn encoder technologie
- Oriental Motor: Ruimtebesparende oplossing voor tweeassige systemen
- Indumation 2022: Act In Time stelt voor
- iCON: Breed inzetbare elektrische cilinders van Concens
- BLV-R: Ultra compacte Brushless Driver
- MD800 COMPACTE AC MULTIDRIVE
- Wikkeltoepassingen bij Xtraflex
- Uitdaging: Levertermijnen baren iedereen zorgen, maar er zijn nog uitzonderingen!
- Nieuw in het gamma: 'Direct Drive' Lineaire motoren
- White Paper: Toenemende interesse in elektrische actuatoren
- Nieuwe, uiterst compacte BLDC motoren van ShaYangYe
- Lineaire actuator met closed loop stappenmotor voor gripper-toepassing
- Oriental motor draaitafels nu ook aanstuurbaar via Profinet
- PROFINET beschikbaar voor Oriental Motor closed loop stappenmotoren
- Haydon Kerk Pittman introduceert het compacte Z-Theta Motion Platform
- Update van Mactalk voor JVL geïntegreerde servo- en stappenmotoren
- Compacte 24V DC drives voor de aansturing van trommelmotoren
- Maatwerk reductiekast voor specifieke toepassingen
- Heavy Duty linear actuator geschikt voor gebruik buiten
- Oriental motor programma nu beschikbaar met EtherCAT Drives
- Calculation tool : Lineaire sledes en elektrische cilinders
- Maedler - Nieuwigheden in het programma
- Toepassing: Oriental motor borstelloze DC-motor voor mengers
- ICON - de nieuwe generatie intelligente actuatoren van Concens
- Haydon Kerk – Custom lineaire slede met droge smering.
- AGV aandrijving met Newstart tandwielkast
- INOVANCE - Official Authorized Distributor
- Elektrische Grijper van Orientalmotor
- Ultra compacte all-in-one motor
- Veiligheidskoppeling
- Extra krachtige elektrische cilinders
- Oriental Motor nieuwe tandheugelsystemen
- Nieuwe BLH serie met communicatie
- Low-cost borstelloze DC motoren
- Oriental Motor introduceert stappenmotor voor constant gebruik
- Nieuw product van Haydon Kerk: de MSA mini-slede
- Ultra-compacte wormwielkasten
- Lineaire actuator met Servostep
- DOGA – motor 510
- Nieuwe aandrijfmotoren voor AGV toepassing
- Nieuw type lineaire geleiding
- Closed loop stappenmotor met geïntegreerde sturing
- Haakse reductiekast met holle as voor BLDC motoren
- HaydonKerk
Lineaire actuator met closed loop stappenmotor voor gripper-toepassing
Zou een robot ooit autonoom een vracht kunnen lossen van een vrachtship?
Dit was de vraag die Voxdale en MVH-group zich stelden en waar Act In Time samen met nog een aantal andere technologiepartners mee een antwoord op bedacht.
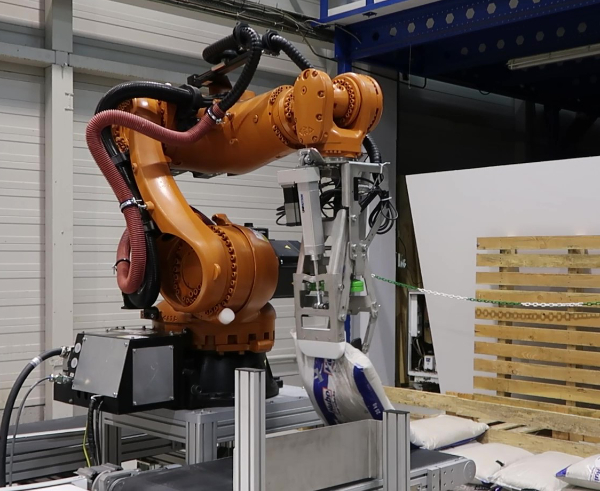
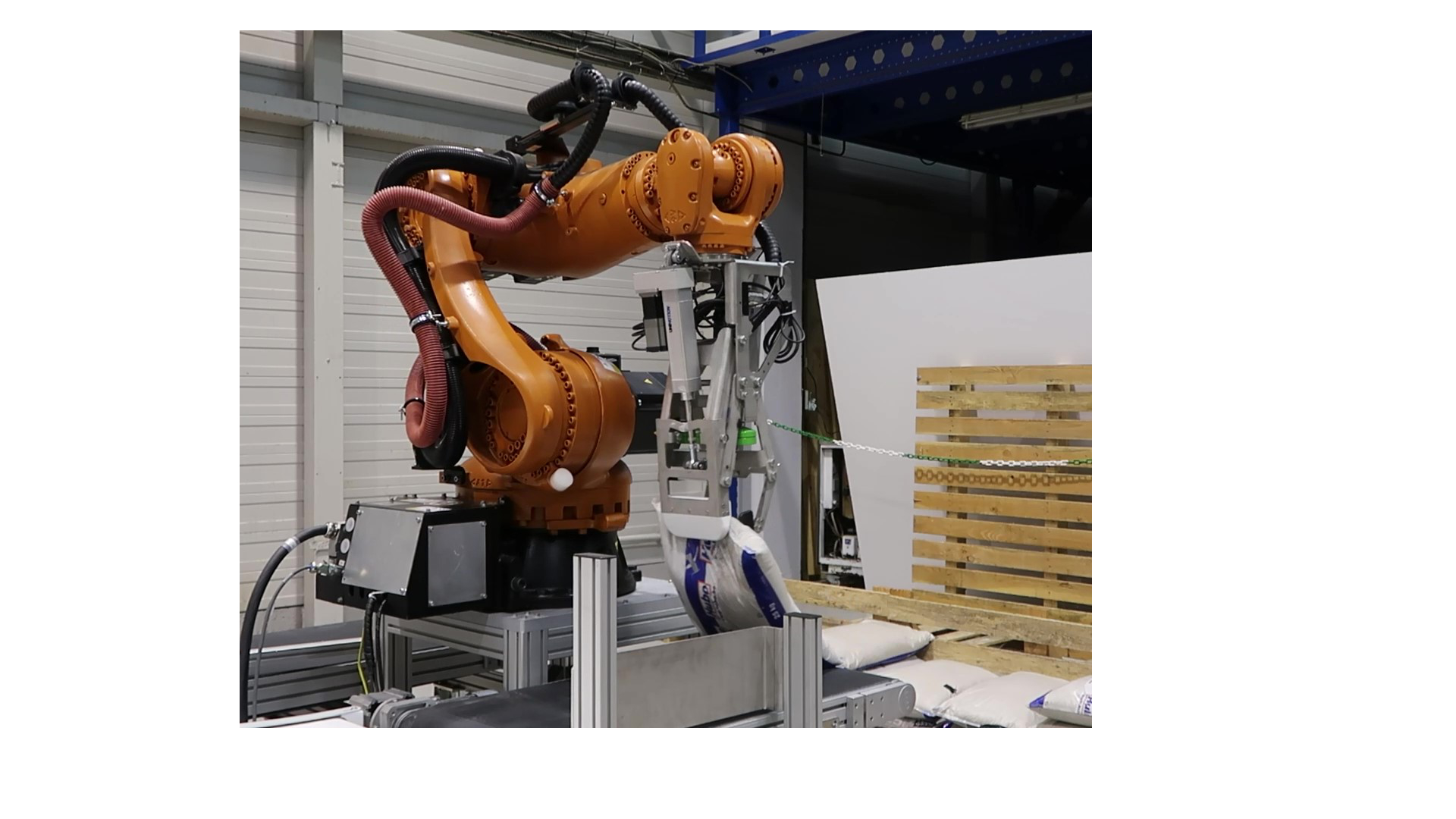
In de film hieronder is te zien hoe een robotarm zakken cement van een pallet lost. De moeilijkheid hierbij is dat zulke zakken niet altijd mooi dezelfde dikte of stevigheid hebben. Met dat vraagstuk is Act In Time aan de slag gegaan en samen met de ontwikkelaars bij Voxdale tot een mooie oplossing gekomen voor de beweging van de grijper. De PNCE met kogelomloopspindel van Unimotion als lineaire actuator werd gecombineerd met een closed loop AZ-stappenmotor van Orientalmotor die over de EtherCAT bus van de robotcontroller aangestuurd wordt. Dit bleek een uitstekende combinatie om aan alle eisen te voldoen:
In de eerste fase is er een snelle beweging nodig die de grijper opent of sluit, deze wordt ingesteld op positie. De ingebouwde absolute positie encoder van Orientalmotor die zonder batterij werkt, garandeert ten allen tijden dat de correcte positie bereikt wordt.
Zodra de grijpers zich dichter bij de last bevinden, wordt er overgeschakeld naar een instelling op duwkracht. Ook dat is een unieke feature van de closed loop technologie die het mogelijk maakt dat stappenmotoren ook voor toepassingen waar koppelregeling noodzakelijk zijn, gebruikt kunnen worden. Dankzij een intelligente mechanische constructie centreert de grijper zich omheen het product wordt dus dezelfde grijpkracht bereikt, onafhankelijk van de dikte van de zak of last.

De zogenaamde 'T-Rex' robotarm kan op die manier veilig de zakken cement vastgrijpen en verplaatsen naar een afvoerband, net zoals een mens dit zou doen. Er is geen risico meer dat de zakken daarbij beschadigd worden, aangezien de kracht perfect kan worden afgesteld en steeds dezelfde blijft.
De verschillende onderdelen werden door verschillende partijen voorzien:
- De robotarm zelf is van KUKA makelij.
- De sensoriek om de omgeving rond de robot te scannen en op die manier veilig door de ruimte te laten bewegen, werd door Pickit 3D voorzien.
- De gripper werd door Act In Time samengesteld uit de PNCE-actuator en samen met de AZ-closed loop-stappenmotor.


Afbeeldingen
Zoek & Vind
Het juiste nieuws
STEL UW VRAAG
Heeft u vragen bij één van onze producten of diensten?