Zoek & Vind
Het juiste nieuws
Nieuwsoverzicht
- Waarom en hoe een machine koppelen aan het internet via IoT
- Nieuw partnerschap: Bansbach Easylift
- Verse Patisserie dankzij de MD800 multi-as frequentiesturing
- Oriental Motor breidt het gamma aan elektrische grijpers uit.
- Maedler: nieuwe producten en handige e-cataloog
- White paper: Motorkeuze in lineaire bewegingstoepassingen
- Oriental Motor: Nieuwe connectoren AZ-familie zorgen voor IP66 bescherming.
- Nieuw in het gamma: gasveren
- JVL: 320W geïntegreerde Borstelloze DC motor voor OEM machines MAC320-L
- Restenergie recupereren met INOVANCE frequentieregelaars en een Active Front End
- Energiebesparen met efficiënte en compacte drives van Oriental Motor
- HaydonKerk: Nieuwe lineaire slede brengt alle technologische voordelen samen in 1 product
- Doga: 2 nieuwe motoren én een nieuwe cataloog
- White paper: Stappenmotoren en het effect van acceleratie/ deceleratie
- JVL: Nieuwe generatie MAC140/MAC141 Motoren met Absolute multi-turn encoder technologie
- Oriental Motor: Ruimtebesparende oplossing voor tweeassige systemen
- Indumation 2022: Act In Time stelt voor
- iCON: Breed inzetbare elektrische cilinders van Concens
- BLV-R: Ultra compacte Brushless Driver
- MD800 COMPACTE AC MULTIDRIVE
- Wikkeltoepassingen bij Xtraflex
- Uitdaging: Levertermijnen baren iedereen zorgen, maar er zijn nog uitzonderingen!
- Nieuw in het gamma: 'Direct Drive' Lineaire motoren
- White Paper: Toenemende interesse in elektrische actuatoren
- Nieuwe, uiterst compacte BLDC motoren van ShaYangYe
- Lineaire actuator met closed loop stappenmotor voor gripper-toepassing
- Oriental motor draaitafels nu ook aanstuurbaar via Profinet
- PROFINET beschikbaar voor Oriental Motor closed loop stappenmotoren
- Haydon Kerk Pittman introduceert het compacte Z-Theta Motion Platform
- Update van Mactalk voor JVL geïntegreerde servo- en stappenmotoren
- Compacte 24V DC drives voor de aansturing van trommelmotoren
- Maatwerk reductiekast voor specifieke toepassingen
- Heavy Duty linear actuator geschikt voor gebruik buiten
- Oriental motor programma nu beschikbaar met EtherCAT Drives
- Calculation tool : Lineaire sledes en elektrische cilinders
- Maedler - Nieuwigheden in het programma
- Toepassing: Oriental motor borstelloze DC-motor voor mengers
- ICON - de nieuwe generatie intelligente actuatoren van Concens
- Haydon Kerk – Custom lineaire slede met droge smering.
- AGV aandrijving met Newstart tandwielkast
- INOVANCE - Official Authorized Distributor
- Elektrische Grijper van Orientalmotor
- Ultra compacte all-in-one motor
- Veiligheidskoppeling
- Extra krachtige elektrische cilinders
- Oriental Motor nieuwe tandheugelsystemen
- Nieuwe BLH serie met communicatie
- Low-cost borstelloze DC motoren
- Oriental Motor introduceert stappenmotor voor constant gebruik
- Nieuw product van Haydon Kerk: de MSA mini-slede
- Ultra-compacte wormwielkasten
- Lineaire actuator met Servostep
- DOGA – motor 510
- Nieuwe aandrijfmotoren voor AGV toepassing
- Nieuw type lineaire geleiding
- Closed loop stappenmotor met geïntegreerde sturing
- Haakse reductiekast met holle as voor BLDC motoren
- HaydonKerk
White paper: Stappenmotoren en het effect van acceleratie/ deceleratie
Bij Act in Time krijgen we regelmatig vragen over de juiste interpretatie van de specificaties die de verschillende fabrikanten van stappenmotoren in hun documentatie meegeven.
Deze white paper legt uit wat het effect is van acceleratie en deceleratie op de kracht versus snelheidscurves bij lineaire stappenmotoren. Om dit duidelijk te maken, beschrijven we eerst de methode waarop dit gemeten wordt.
Een van de parameters waarmee rekening wordt gehouden bij het kiezen van een op stappenmotor gebaseerde lineaire actuator voor een toepassing, is hoeveel kracht de actuator kan produceren. Dus natuurlijk is een snelheid versus kracht curve de eerste plaats waar iemand kijkt bij de selectie van de actuator. Er zijn een aantal verschillende manieren om deze snelheid versus krachtcurven te presenteren, de ene is kracht versus pulsen en de tweede is kracht versus lineaire snelheid. De maximale kracht bij verschillende stapsnelheden in het bruikbare snelheidsbereik voor elk type actuator wordt geregistreerd en gebruikt om de curves te genereren. De moeilijkste belastingsconditie is wanneer een verticale belasting te allen tijde volledig door de actuator wordt ondersteund. Om onder deze omstandigheden te testen, werd een aangepast portaal gemaakt om de actuator met de juiste mechanische uitlijning vast te houden, de belasting toe te passen en ook een middel te bieden om de verplaatsing van de actuator te meten, allemaal tegelijkertijd.

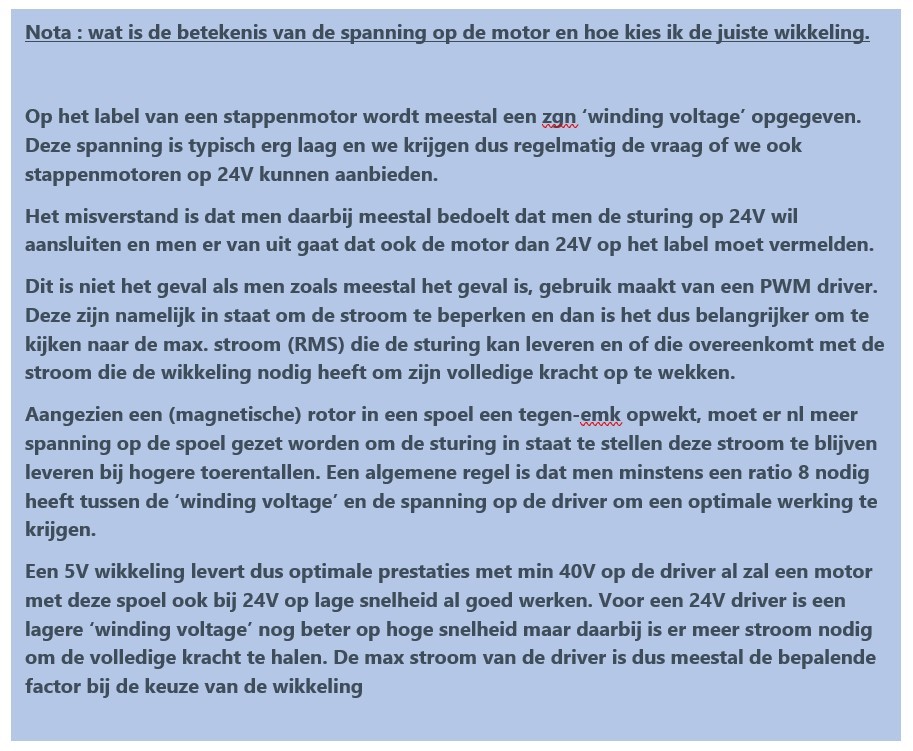
Een stappenmotor driver is het andere belangrijke apparaat dat nodig is om dit experiment uit te voeren. Met het doel van dit experiment om de voordelen van het toevoegen van acceleratie aan een loopprofiel te laten zien, moest een chopperaandrijving worden gebruikt. Een PCM4826 samen met de IDEA-aandrijfsoftware werd gebruikt om de motor aan te drijven. Een 40 volt voeding werd gebruikt om de aandrijving van stroom te voorzien, samen met het gebruik van een 5 volt motorspoel om de 8 op 1 spanningsverhouding te behouden. De 8 op 1 spanningsverhouding werd gebruikt om de optimale prestaties van de motor te bereiken (zie nota : wat is de betekenis van de spanning van de spoel en hoe kies ik de juist type van wikkeling). Een eenvoudig programma werd gemaakt om de motor te laten bewegen met volgend profiel:
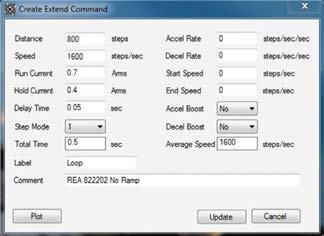
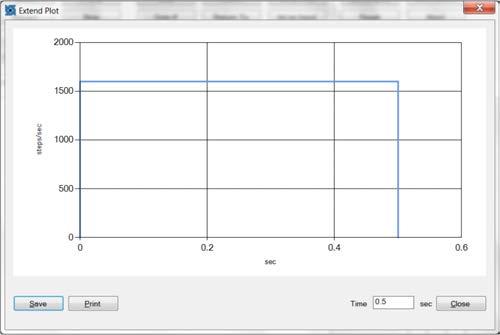
Wanneer deze beweging wordt uitgezet zoals in Fig 3, ziet u dat de motor onmiddellijk gevraagd wordt om te beginnen met bewegen bij 1600 volledige stappen per seconde omdat er geen acceleratie wordt gebruikt. De motor moet de rotortraagheid en het gewicht dat zich op het portaal bevindt, onmiddellijk overwinnen.
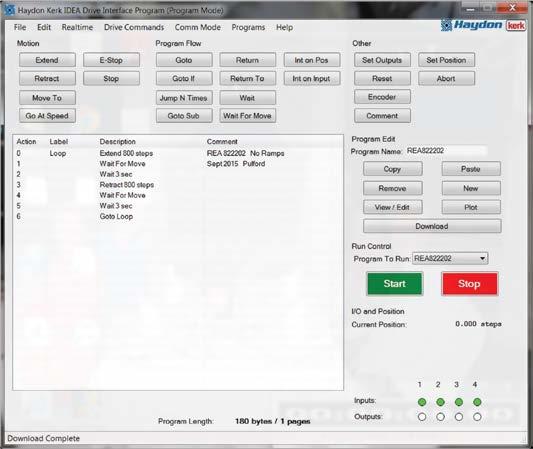
Dit bewegingsprofiel, figuur 4, werd in een lus geplaatst, zodat het zou worden herhaald totdat het handmatig werd gestopt. Hierdoor ging de actuator op en neer met de aangegeven snelheid. Terwijl de actuator bewoog, werd de belasting van het dode gewicht stapsgewijs verhoogd totdat de maximale operationele kracht waarbij de motor niet meer in staat was om het gewicht omhoog te duwen was verkregen. De indicator aan de bovenkant van het portaal gaf feedback over het feit of de actuator al dan niet vastliep of stappen miste en het gewicht werd geregistreerd.
De snelheid was de enige parameter die werd gewijzigd om een snelheid versus krachtcurve te genereren. In dit experiment werden snelheden van 100 tot 2500 volledige stappen per seconde getest. Nadat alle gegevenspunten waren genomen zonder een acceleratie te gebruiken, moest het commando worden aangepast om acceleratie op te nemen. De settings waren als volgt:
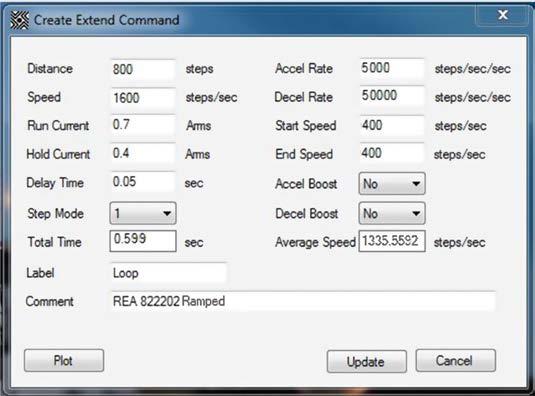
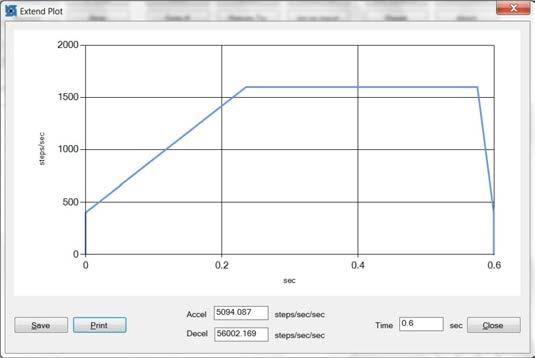
Wanneer deze beweging wordt zoals in figuur 6, ziet u dat de motor gevraagd wordt om te beginnen met bewegen met 400 volledige stappen per seconde en vervolgens te versnellen tot 1600 volledige stappen per seconde met een snelheid van 5000 volledige stappen per seconde in het kwadraat. De snelheid wordt dan constant gehouden totdat het tijd is om te vertragen waar een steile vertraging van 50000 volledige stappen per seconde in het kwadraat werd gebruikt tot een snelheid van 400 volledige stappen per seconde en vervolgens de motor werd bevolen om te stoppen. Met acceleratie toegevoegd aan de beweging, moet de motor nog steeds de rotortraagheid overwinnen, samen met het gewicht op het portaal, maar met een langzamere beginsnelheid en vervolgens verhoogd totdat de topsnelheid is bereikt.
Nogmaals, gegevenspunten werden genomen terwijl de snelheid varieerde van 100 tot 2500 volledige stappen per seconde en het maximale gewicht voordat gemiste stappen of stilstand plaatsvonden, werd geregistreerd. Hieronder in figuur 7 ziet u de kracht versus snelheid (pulsen/sec) plot met en zonder versnelling.
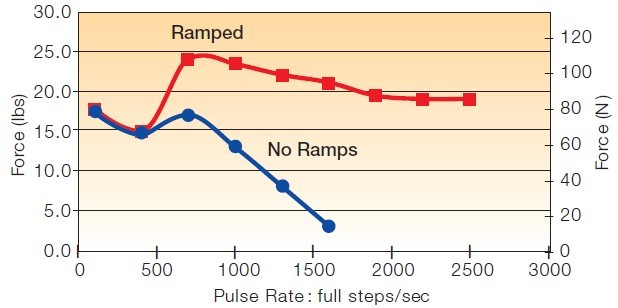
Het gebruik van een acceleratie heeft een grote invloed op de prestaties van een stappenmotor. In dit experiment bevond de actuator zich in een verticale oriëntatie, zodat het gebruik van een versnelling de motor in staat stelde om veel meer gewicht te verplaatsen. Dit komt omdat de motor werd gevraagd om met een lagere snelheid te gaan bewegen en vervolgens geleidelijk zijn snelheid te verhogen totdat de topsnelheid was bereikt. Een zeer steile vertraging werd gebruikt om de belasting te vertragen voordat de actuator werd bevolen om te stoppen. Tijdens een liftbeweging in een verticale applicatie wil het gewicht van nature vertragen waardoor het gebruik van een lange vertraging niet nodig is. Acceleratie heeft eigenlijk alleen voordelen bij het gebruik van een actuator bij hoge snelheden, wat te zien is in de bovenstaande plot. De dip in de plot wordt veroorzaakt door resonantie. Dit is wanneer de stapsnelheid gelijk is aan de natuurlijke frequentie van de motor. Versnellings- en vertragingshellingen kunnen de motor helpen om zo snel mogelijk door deze resonantiezone te komen om de effecten te verminderen. Het gebruik van versnellingshellingen is zeer toepassingsafhankelijk. Er zijn verschillende dingen om rekening mee te houden bij het bepalen van een profiel, enkele hiervan zijn:
• De beschikbare slag van de actuator
• Type belasting: wrijving, traagheid, mechanische veer of een combinatie hiervan
• Oriëntatie van de belasting: horizontaal, verticaal of daartussenin
• Vereiste snelheid
• Type sturing : L / R type of PWM type (kan ze correcte acceleratie / vertragingscurves genereren?)
• Max stroom die de sturing kan leveren
• De verhouding tussen Voedingsspanning en motorspanning
De slag van de actuator heeft invloed op de versnelling, omdat u maar zoveel tijd hebt om uw volledige gewenste beweging uit te voeren. Hoe langer de slag, hoe meer totale tijd er is voor een beweging, dus een langere versnelling zou kunnen worden gebruikt. De oriëntatie van de belasting beïnvloedt ook het gebruik van versnellings- en vertragingsprofielen. Voor een horizontale beweging zal zowel een versnelling als een vertraging gunstig zijn om de lading in beweging te krijgen en vervolgens te helpen vertragen, zodat er geen overshoot is.
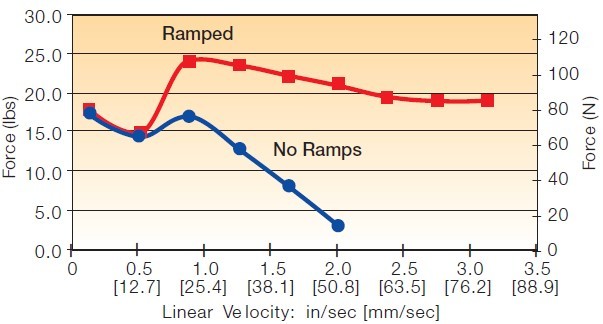
Laten we eens kijken naar de voordelen van een versnellingshelling in een potentiële toepassing in de echte wereld. Als men probeerde een motor te dimensioneren voor een toepassing en een belasting van 7kg moest verplaatsen met een snelheid van 30 mm/s, zou men kunnen concluderen dat de motor die in dit experiment werd getest niet de juiste keuze zou zijn bij het bekijken van de curve zonder ramping. In feite zou deze motor werken als de toepassing een acceleratie mogelijk maakte. De motor die in dit experiment met een acceleratie werd getest, kon een belasting van ongeveer 10kg verplaatsen, wat ook nog steeds enige veiligheidsmarge biedt.
De grafiek in figuur 8 toont de kracht versus snelheidscurve waar deze gegevenspunten zijn genomen. De actuator in dit experiment had een lineaire slag van 0,031 mm per stap, dus de gegevenspunten werden geconverteerd van stappen per seconde vermenigvuldigd met de afstand per stap om een lineaire snelheid van centimeters per seconde te krijgen. Het is empirisch geleerd dat een factor 1,6 kan worden toegepast op een krachtcurve zonder ramping om een schatting te krijgen van de potentiële kracht die de actuator kan uitvoeren als een versnellingshelling wordt gebruikt.
Dit technische artikel is opgesteld door het engineeringteam van Haydon Kerk Pittman Motion Solutions, een leider in bewegingstechnologieën. Bij het evalueren van de behoeften van een systeem en het vergelijken ervan met de kracht van een lineaire actuator is het belangrijk om te onthouden dat er verschillende factoren zijn die de prestaties van de actuatoren kunnen verbeteren of in gevaar kunnen brengen. Sommige factoren zoals de stroom en de spanningsverhouding zijn belangrijke factoren. De toevoeging van een acceleratie en vertraging aan een bewegingsprofiel kan het verschil zijn in het blijven werken met compactere actuator. Dit experiment was ontworpen om de effecten te laten zien van het gebruik van een versnelling om de lineaire actuator in staat te stellen hogere belastingen en lineaire snelheid te laten bereiken dan zou worden gerealiseerd door de standaard prestatiecurven te volgen.
Afbeeldingen

Zoek & Vind
Het juiste nieuws
STEL UW VRAAG
Heeft u vragen bij één van onze producten of diensten?