Cherche & Trouve
Les nouvelles
Nieuwsoverzicht
- Waarom en hoe een machine koppelen aan het internet via IoT
- Verse Patisserie dankzij de MD800 multi-as frequentiesturing:
- Maedler : nouveaux produits 2023 et e-catalogue très pratique!
- Papier blanc: L’importance de la sélection du moteur pour les applications de mouvement linéaire.
- Oriental Motor : nouveau connecteur IP 66 pour les moteurs AZ
- Récupération de l’énergie résiduelle par INOVANCE avec module Active Front End
- Économie d’énergie grâce aux moteurs et drives compacts d’Oriental Motor.
- HaydonKerk: Nouveau chariot linéaire réunissant tous les avantages technologiques en un seul produit.
- Livre blanc: Les moteurs pas à pas et l’effet des rampes d’accélération et de décélération
- JVL : Nouveau moteur MAC140/MAC141 avec codeur multi-tour absolu
- iCON de Concens, le vérin électrique polyvalent
- BLV-R : Driver ultra compact pour moteur CC sans balais
- MD800 CA MULTIDRIVE COMPACT
- Bobinage chez Xtraflex
- Notre défi : Les délais de livraison nous inquiètent, mais il y a toujours des exceptions !
- Nouveau dans la gamme : Moteurs linéaires “direct Drive”
- Article: intérêt croissant pour les actionneurs électriques
- Nouveaux moteurs BLDC ultra compacts de Sha Yang Ye
- Actionneur linéaire avec moteur pas à pas en boucle fermée pour application d’une pince de préhension
- Les plateaux rotatifs creux d’Oriental motor peuvent désormais être contrôlés par Profinet.
- Haydon Kerk Pittman présente la plateforme de mouvement compacte Z-Theta
- Nouvelle mise à jour de Mactalk pour les servomoteurs et moteurs pas à pas intégrés de JVL
- Drive de pilotage 24VDC pour l’asservissement de tambours moteurs.
- Réducteur sur mesure pour des applications spécifiques
- Oriental motor disponible en version EtherCAT Drives
- Outil de calcul : axes linéaires et vérins électriques
- Madler : nouveautés dans le programme
- Application: Brushless BLE2 moteur pour mélangeurs
- Concens - Nouvelle génération d'actionneurs intéligents
- Haydon Kerk – Axe lineaire à lubrification sèche
- Moteurs AGV avec réducteur de la série NTQ de Newstart
- INOVANCE - Official Authorized Distributor
- Electric Gripper d' Orientalmotor
- Moteur ultra compact tout-en-un
- Accouplement de sécurité
- Extra krachtige elektrische cilinders
- Oriental Motor nouveau système crémaillère
- Nouvelle série BLH avec communication
- Moteurs à courant continu sans balais à faible coût
- Oriental Motor introduces 5 phase stepper motors with speed control
- Haydon Kerk propose sur le marché le nouveau mini rail linéaire MSA.
- Ultra-compacte wormwielkasten
- Actionneur linéaire Mecvel
- DOGA – moteur 510
- Nouveau moteurs pour 'smart AGV'
- Nouveau type de guidage linéaire
- Moteur pas à pas avec communication Ethernet
- Réducteur a renvoi d'angle avec arbre creux pour moteur brushless
- HaydonKerk
Livre blanc: Les moteurs pas à pas et l’effet des rampes d’accélération et de décélération
Chez Act in Time, nous recevons régulièrement des questions sur l’interprétation correcte des spécifications que les différents fabricants de moteurs pas à pas donnent dans leur documentation.
Ce dossier explique la méthode du banc d’essai pour générer des courbes de force par rapport à la vitesse et ses avantages ainsi que l’effet des rampes d’accélération et de décélération.
L’un des premiers paramètres pris en compte lors du choix d’un actionneur linéaire à moteur pas à pas pour une application est la force que l’actionneur peut produire. Donc, naturellement, une courbe de vitesse par rapport à la force est le premier élément à vérifier. Il existe plusieurs façons de présenter ces courbes de vitesse par rapport à la force, l’une est la force par rapport à la fréquence des impulsions et la seconde est la force par rapport à la vitesse linéaire. La force maximale à différentes vitesses de pas sur toute la plage des vitesses utilisables pour chaque type d’actionneur est enregistrée et utilisée pour générer ces courbes. La condition de charge la plus élevée est lorsqu’une charge verticale est entièrement prise en charge par l’actionneur à tout moment. Ces conditions sont recréées par un banc d’essais qui maintient l'actionneur dans un alignement parfait en appliquant la charge et mesurant le déplacement de l'actionneur, le tout en même temps.

Le contrôleur ou driver du moteur pas à pas est l’autre pièce essentielle pour effectuer cet essai. Le but étant de montrer les avantages d’ajouter une courbe d’accélération, un entraînement par hacheur ou chopper est utilisé. Un PCM4826 combiné au logiciel d’entraînement IDEA est utilisé pour entraîner le moteur. Une alimentation de 40 volts alimente le moteur et un enroulement de 5 volts est utilisé pour maintenir un rapport de tension de 8 pour 1, permettant d’optimaliser les performances du moteur. (Voir note : signification de la tension de l’enroulement et comment choisir le bon type d’enroulement).
Une programmation simple actionne le moteur de la manière suivante :
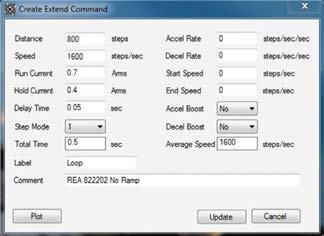
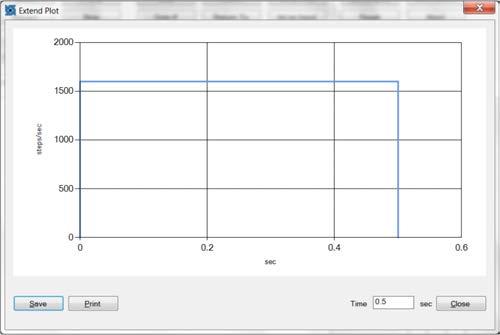
Lorsque ce mouvement est tracé, vous pouvez vérifier (Figure 3) que le lecteur demande immédiatement au moteur de se déplacer à 1600 pas complets par seconde, car aucune accélération n’est sollicitée. Le moteur doit surmonter instantanément l’inertie du rotor et le poids mort se trouvant sur le portique.
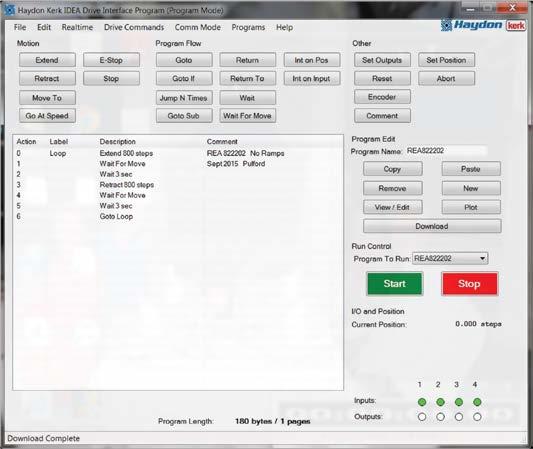
Le profil de déplacement (figure 4) est placé dans une boucle afin qu’il se répète jusqu’à s’arrêter mécaniquement. L’actionneur monte et descend à la vitesse requise. Pendant que l’actionneur se déplace, la charge de poids mort est progressivement augmentée jusqu’à ce que la force de sortie opérationnelle maximale soit obtenue juste au point de décrochage. L’indicateur situé en haut du portique indique si l’actionneur a subi un décrochage ou manqué des pas et si le poids a été enregistré.
La vitesse est le seul paramètre qui est modifié afin de générer une courbe de vitesse par rapport à la force. Dans ce banc d’essais, des vitesses de 100 à 2500 pas complets par seconde sont testées. Une fois que tous les points de données ont été pris sans utiliser de profil d’accélération, la commande d’extension est ajustée pour inclure une rampe d’accélération. Les entrées du profil d’exécution dans la commande d’extension avec accélération sont les suivantes :
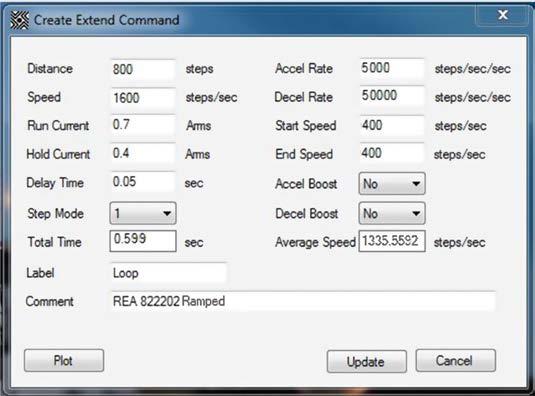
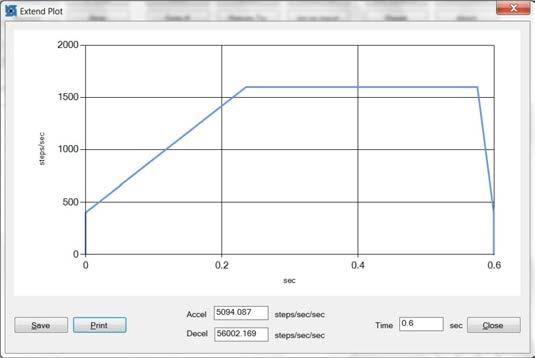
Lorsque ce mouvement est tracé, vous pouvez vérifier (Figure 6) que le lecteur demande au moteur de commencer à se déplacer à 400 pas complets par seconde, puis d’accélérer jusqu’à 1600 pas complets par seconde à une vitesse de 5000 pas complets par seconde au carré. La vitesse est ensuite maintenue constante jusqu’à ce qu’il soit temps de ralentir où une décélération abrupte de 50000 pas complets par seconde au carré est utilisée jusqu’à une vitesse de 400 pas complets par seconde, puis le moteur reçoit l’ordre d’arrêt. L’accélération ajoutée au mouvement, le moteur doit encore surmonter l’inertie du rotor ajouté au poids sur le portique, mais à une vitesse initiale plus lente, puis augmentée jusqu’à ce que la vitesse maximale soit atteinte.
Là encore, les points de données sont enregistrés en faisant varier la vitesse de 100 à 2500 pas complets par seconde et le poids maximum avant que les pas manqués ou le décrochage ne se produisent. Ci-dessous, (figure 7) vous pouvez vérifier le graphique force rapporté à la vitesse (pulse rate) avec et sans accélération.
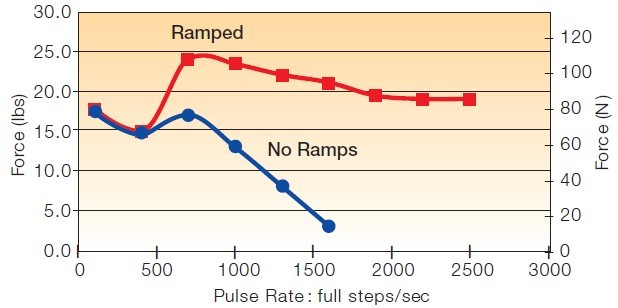
L’utilisation d’une rampe d’accélération affecte grandement les performances d’un moteur pas à pas. Dans ce banc d’essai, l’actionneur est orienté verticalement, de sorte que l’utilisation d’une rampe d’accélération a permis au moteur de déplacer beaucoup plus de poids. En effet, on demande au moteur de commencer à se déplacer à une vitesse plus lente, puis d’augmenter progressivement sa vitesse jusqu’à ce que la vitesse maximale soit atteinte. Une décélération très forte aide à ralentir la charge avant que l’actionneur ne reçoive l’ordre d’arrêt. Lors d’un déplacement d’extension dans une application verticale, le poids ralentit naturellement, de sorte que l’utilisation d’une longue décélération n’est pas nécessaire. La rampe d’accélération n’a vraiment d’avantages que lors de l’utilisation d’un actionneur à des vitesses élevées, ce qui peut être vu dans le graphique ci-dessus. Le creux dans la courbe est causé par la résonance. A ce moment-là, la vitesse de pas est égale à la fréquence naturelle du moteur. Les rampes d’accélération et de décélération peuvent aider le moteur à traverser cette zone de résonance le plus rapidement possible pour en réduire les effets. L’utilisation de rampes d’accélération dépend beaucoup de l’application. Il y a plusieurs choses à prendre en considération lors de la détermination d’un profil de course, notamment :
• La course disponible de l’actionneur
• Type de charge : frictionnel, inertiel, ressort mécanique, ou une combinaison de ceux-ci
• Orientation de la charge : horizontale, verticale ou entre les deux
• Vitesse requise
• Type d’entraînement : L / R de chopper (peut-il supporter l’accélération / décélération ?)
• Courant d’entraînement fourni
• Le rapport tension source/tension moteur
La course de l’actionneur affecte l’accélération, car vous n’avez que peu de temps pour accomplir le mouvement complet souhaité. Plus la course est longue, plus vous avez de temps total pour un mouvement, plus une accélération longue est possible. L’orientation de la charge influence également l’utilisation des courbes d’accélération et de décélération. Pour un mouvement horizontal, une accélération et une décélération sont bénéfiques pour bouger la charge, puis pour l’aider à ralentir afin de ne pas dépasser la position finale. Jetons un coup d’œil aux avantages d’une rampe d’accélération d’un cas concret. Si une personne essayait de dimensionner un moteur pour une application devant déplacer une charge de 7 kg à une vitesse de 30 m par seconde, on pourrait conclure que le moteur testé n’est pas le bon choix au regard de la courbe sans rampe. Concrètement, ce moteur fonctionnerait si l’application permettait une rampe d’accélération. Le moteur avec une rampe d’accélération a pu déplacer une charge d’environ 10 Kg, offrant une marge de sécurité.
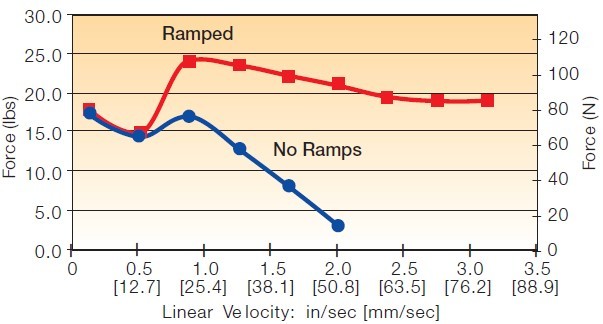
Le graphique (figure 8) montre la courbe de force en fonction de la vitesse où ces points de données ont été pris. L'actionneur de cette expérience avait une course linéaire de 0,031 mm par pas, les points de données ont donc été convertis en pas par seconde multipliés par la distance par pas pour obtenir une vitesse linéaire en centimètres par seconde. Empiriquement, un facteur de 1,6 peut être appliqué à une courbe de force sans rampe pour estimer la force potentielle que l’actionneur peut produire avec une rampe d’accélération.
Cet article technique a été préparé par l'équipe d'ingénieurs de Haydon Kerk Pittman Motion Solutions, leader dans les techniques du mouvement. Lors de l'évaluation des besoins d'un système et de sa comparaison avec la force d'un actionneur linéaire, il est important de se rappeler que plusieurs facteurs peuvent améliorer ou compromettre les performances de l'actionneur. Certains facteurs tels que le rapport entre le courant et la tension, sont importants. L'ajout d'une accélération et d'une décélération peut être déterminant pour que l'actionneur reste compact. Ce banc d’essais a été conçu pour montrer les effets de l'utilisation d'une accélération pour permettre à l'actionneur linéaire d'atteindre des charges et une vitesse linéaire plus élevées que celles qui seraient obtenues en suivant les courbes de performance standard.
Note : quelle est la signification de la tension du moteur et comment choisir le bon enroulement.
La plaquette signalétique d'un moteur pas à pas mentionne généralement la "tension d'enroulement". Cette tension est généralement très faible et on nous demande régulièrement si nous pouvons proposer des moteurs pas à pas à 24V. Il y a un malentendu et l’on confond généralement l’alimentation du contrôleur alimenté en 24V et l’on suppose donc que le moteur lui aussi mentionne cette tension de 24V. Ce n'est généralement pas nécessaire dans le cas d’un contrôleur PWM. Celui-ci limite le courant et seule la vérification du courant maximum (RMS) que le contrôleur peut délivrer et qui doit correspondre au courant dont l’enroulement a besoin pour générer toute sa force, est importante. Étant donné qu'un rotor (magnétique) dans sa bobine génère une force électromagnétique contraire, il faut appliquer une tension plus élevée à la bobine pour permettre au contrôleur de fournir le courant à des vitesses plus élevées. En règle générale, il faut au moins un rapport de 8 entre la tension d’enroulement et la tension du contrôleur pour obtenir un fonctionnement optimal. Ainsi, un bobinage de 5V fournit des performances optimales à 40V pour le contrôleur, bien qu’un moteur avec cette bobine fonctionne également bien à 24V à basse vitesse. Pour un contrôleur de 24V, une tension d'enroulement plus faible est encore meilleure à haute vitesse, mais un courant plus important est nécessaire pour obtenir la pleine puissance. Ainsi, le courant maximal du contrôleur est généralement le facteur déterminant dans le choix de l'enroulement.
Afbeeldingen

Cherche & Trouve
Les nouvelles
UNE QUESTION ?
Besoin d'un conseil ? choix d'un produits ?